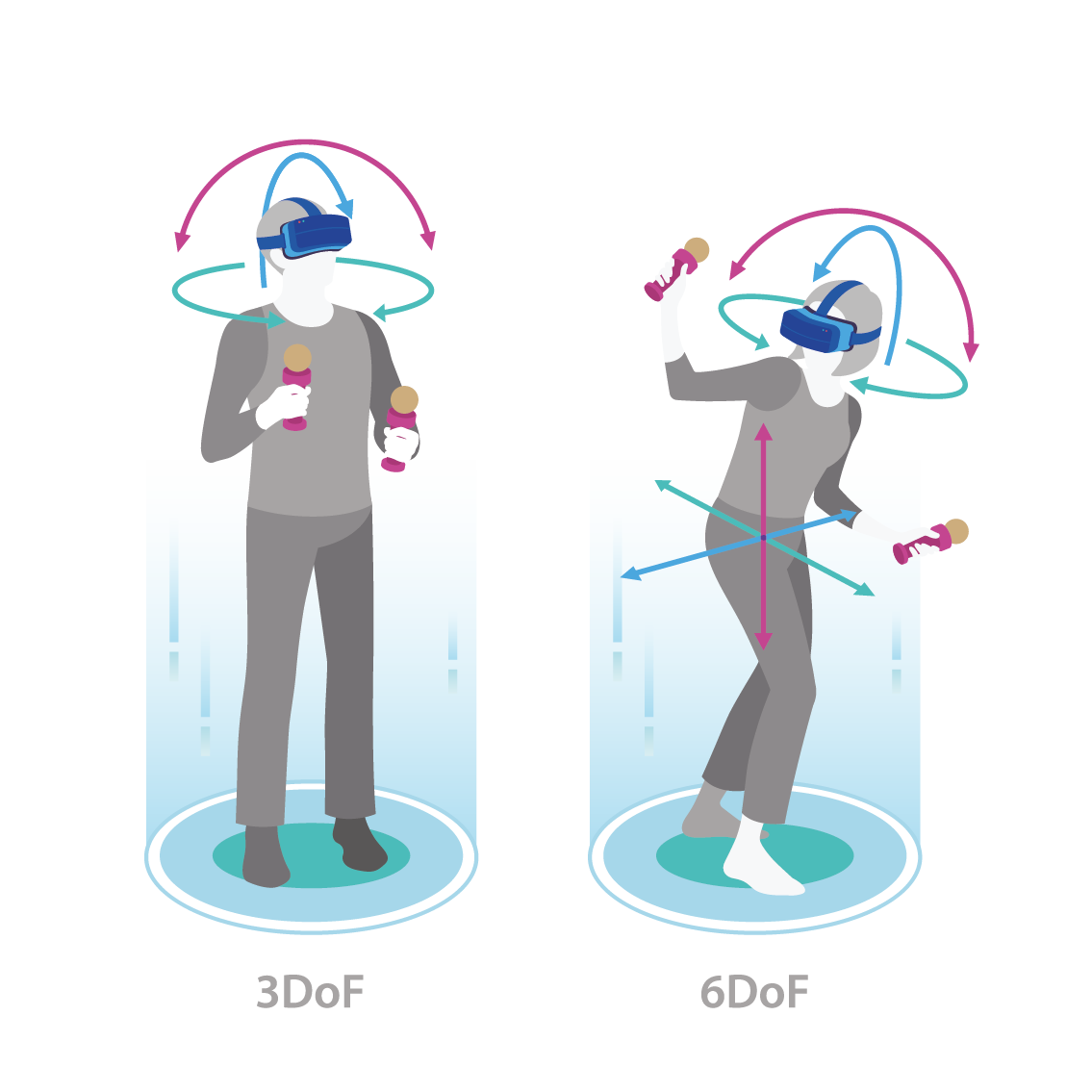
3차원 공간에서 세 방향으로 회전하는 회전 운동(rotational motion)과 평행하게 이동하는 병진 운동(translational motion)이 합쳐진 물체의 6가지 움직임
6자유도(
6DoF)는 강체가 움직일 수 있는 자유의 정도를 표현하는 것으로, 3차원 직각 좌표계에서 운동 물체의 상하 움직임(pitching), 수평 흔들림(rolling), 좌우 회전(yawing)의 세 가지 동작과 각 축과 평행하게 이동하는 좌우 움직임, 앞뒤 움직임, 상하 움직임의 세 가지 동작을 합하여 모두 6가지 자유롭게 움직일 수 있는 자유의 정도를 표현한 것이다.
일반적인
디지털 콘텐츠(
digital content)의 경우 사용자는 자신의 시점을 임의로 변경할 수 없지만 컴퓨터 그래픽으로 구현된 가상 공간 등에서는 사용자의 의도에 따라 상하, 좌우, 앞뒤 회전이 가능한 3자유도 콘텐츠와 추가로 상하, 좌우, 앞뒤 방향의 이동이 가능한 6자유도 콘텐츠를 통하여 관점을 변경하는 경험을 할 수 있다.
예를 들어 오디오 콘텐츠에서 6자유도를 지원한다는 것은 사용자가 가상의 공간에서 이동할 때 사용자의 위치 변경에 따라 음원의 위치가 상대적으로 변경되는 것처럼 느낄 수 있도록 지원하는 것을 의미한다. 참고로 ISO/IEC JTC 1/
SC 29에서 이러한 6자유도 오디오를 위한 표준 제정작업을 한다.
로봇 공학(
robotics)에서 자유도는 로봇을 구성하는 관절의 수에 따라 결정되기도 한다. 관절의 종류에 따라 각 관절의 자유도가 결정되며, 관절의 수에 따라 자유도가 또한 증가한다. 간단한 예로 1자유도를 갖는 관절(예: 한 방향으로의 회전만 가능한 관절)을 여섯 개 가지고 있는 로봇이라고 하면 6자유도를 갖는다고 할 수 있으며, 2자유도(예: 두 방향의 회전, 또는 한 방향의 회전과 한 방향의 이동이 가능한 관절)를 갖는 관절을 세 개 가지고 있는 로봇 역시 6자유도를 갖는다고 한다.